
2015-09-01 - Nº 18
Editorial
Aqui está a Newsletter Nº 18 no seu formato habitual.
Esta Newsletter encontra-se mais uma vez disponível no sistema documenta do altLab. Todas as Newsletters encontram-se indexadas no link.
Esta Newsletter tem os seguintes tópicos:
A NASA lançou um a iniciativa para simular a vida em Marte para que possa estudar os efeitos do isolamento nos humanos. Linus Torvalds lança oficialmente a versão 4.2 do Kernel Linux. Nesta Newsletter iremos construir um circuito que usa o já conhecido 555 para fazer um pequeno piano de 9 notas. O projeto de maker é um Bot que se equilibra sozinho.
 João Alves ([email protected])
João Alves ([email protected])
O conteúdo da Newsletter encontra-se sob a licença  Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
Novidades da Semana ^
Nasa starts year-long isolation to simulate life on Mars
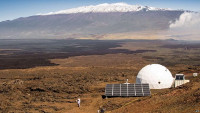
"A team of Nasa recruits has begun living in a dome near a barren volcano in Hawaii to simulate what life would be like on Mars. The isolation experience, which will last a year starting on Friday, will be the longest of its type attempted. Experts estimate that a human mission to the Red Planet could take between one and three years. The six-strong team will live in close quarters under the dome, without fresh air, fresh food or privacy. They closed themselves away at 15:00 local time on Friday (01:00 GMT Saturday). A journey outside the dome - which measures only 36ft (11m) in diameter and is 20ft (6m) tall - will require a spacesuit. A French astrobiologist, a German physicist and four Americans - a pilot, an architect, a journalist and a soil scientist - make up the Nasa team."
THE MAGPI ISSUE 37 - SEPTEMBER 2015
"Featured in The MagPi Issue 37: Build a Raspberry Pi digital home - Eight projects to build tomorrow’s home, today; Stream live from your PC - Use the hottest PC software anywhere in your house; Build a fridge monitor - Everyday engineering brought to life with your Pi; Build a computer vision sequencer - Mike Cook continues his Pi Bakery project series; The Fallout Pip-Boy - How one man made sci-fi fact, just in time for Fallout 4!"
Linux Kernel 4.2 Officially Released, Merge Window for Linux Kernel 4.3 Now Open

"After eight Release Candidate builds, just a few minutes ago, Linus Torvalds announced the release and immediate availability for download of the final version of Linux kernel 4.2."
Ciência e Tecnologia ^
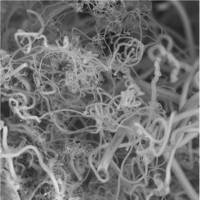
A thin ribbon of flexible electronics can monitor health, infrastructure

"A new world of flexible, bendable, even stretchable electronics is emerging from research labs to address a wide range of potentially game-changing uses. Over the last few years, one team of chemists and materials scientists has begun exploring military applications in harsh environments for aircraft, explosive devices and even combatants themselves."
‘Diamonds from the sky’ approach turns CO2 into valuable products
"Finding a technology to shift carbon dioxide (CO2), the most abundant anthropogenic greenhouse gas, from a climate change problem to a valuable commodity has long been a dream of many scientists and government officials. Now, a team of chemists says they have developed a technology to economically convert atmospheric CO2 directly into highly valued carbon nanofibers for industrial and consumer products."
World's most powerful laser beam blasts out from Osaka

"It instantaneously concentrated energy equivalent to 1,000 times the world's electricity consumption and entered the record books as the most powerful laser beam ever emitted, the researchers said on July 27. Although the energy of the laser beam itself was only powerful enough to run a microwave for about two seconds, the team was able to attain the massive output by concentrating the power to 1 pico-second, or one-trillionth of a second."
Cursos MOOC ^
- Understanding Video Games - Começa a 1 de Setembro.
- Mechanical Behavior of Materials, Part 1: Linear Elastic Behavior - Começa a 9 de Setembro.
- Technology Entrepreneurship - Começa a 16 de Setembro.
- Begin Robotics - Começa a 21 de Setembro.
- Cryptography II - Começa a 19 de Outubro.
Modelos 3D ^
Com a disponibilidade de ferramentas que permitem dar azo a nossa imaginação na criação de peças 3D e espaços como o thingiverse para as publicar, esta rubrica apresenta alguns modelos selecionados que poderão ser úteis.
Configurable triangular coffee capsule holder (http://www.thingiverse.com/thing:993151)
A three-sided generic coffee capsule holder. I needed a coffee capsule holder for my Portuguese Delta Q capsules and most of the models I could find were for Nespresso or Dolce Gusto, hence this design. It fits 12 capsules (4 per side) because that's the amount after which I need to remove the capsules from my machine. Capsule parameters and size can be changed on the beginning of the openscad file.
PS: this is also my first design, so feel free to comment and suggest improvements.
Customizable Bookshelf Keychain (http://www.thingiverse.com/thing:676537)

I built this Bookshelf keychain for a Librarian friend of mine. She was looking for something to use as a demo object for her library's new 3D printer.
The keychain can be customized with any text you'd like, as well as having the text embossed or debossed.
It's a pretty quick print and is great for creating customized objects for groups of any size.
Here's a video showing the build. From drawing, to SketchUp prototype, to finished customizable OpenSCAD design: https://www.youtube.com/watch?v=D8lfMnmhgjc&feature=youtu.be
Customizable Case (Compartment) (http://www.thingiverse.com/thing:386904)

Customizer for making multi-compartment cases. I used (and recommend) PET for these cases, it works well for the 90 degree bends the hinge requires. I haven't tried other plastics.
This design differs from the other customizable rectangular case I recently uploaded in several ways. This one has optional dividers and labels, and has a different hinge and lid design.
Use the "Open in Customizer" button to create one in any size you want.
Circuitos ^
Aqui é apresentado um circuito simples que poderá ser construído com componentes.
Piano com 555
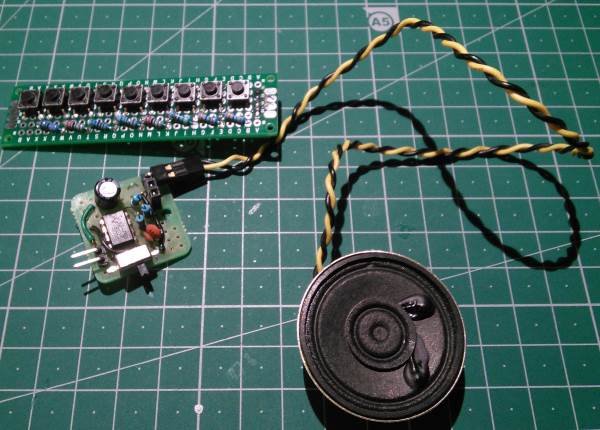
Hoje iremos construir um circuito que usa o IC 555 conjuntamente com uns botões e resistências para tocar as 9 notas musicais.
Este circuito tem um gerador de ondas 555 configurado como um circuito multivibrador astável. Este tipo de operação é caracterizada por uma onda quadrada de saída de largura definida pelo desenhador. A frequência da onda de saída pode ser controlada pela resistência ligada entre os pinos 7-8 e 2-7 para além do condensador ligado ao pino 2 e ao GND. A frequência resultante pode ser calculada de acordo com a seguinte equação:
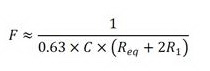
Onde o Req é o resultado de acordo com o botão que está a ser premido.
Desta forma podemos fazer som semelhante ao de um piano digital básico que regula a frequência de saída para as notas musicais.
As notas são tocadas nas seguintes frequências:
| Nota | Frequência | Resistências |
|---|---|---|
| RE1 | 493Hz | R2-R3 |
| DO | 440Hz | R2-R4 |
| SI | 392Hz | R2-R5 |
| LÁ | 349Hz | R2-R6 |
| SOL | 329Hz | R2-R7 |
| FÁ | 293Hz | R2-R8 |
| MI | 261Hz | R2-R9 |
| RE | 246Hz | R2-R10 |
| DO | 200Hz | R2-R11 |
Este circuito foi adaptado de um circuito que se encontra no seguinte link.
Esquemático
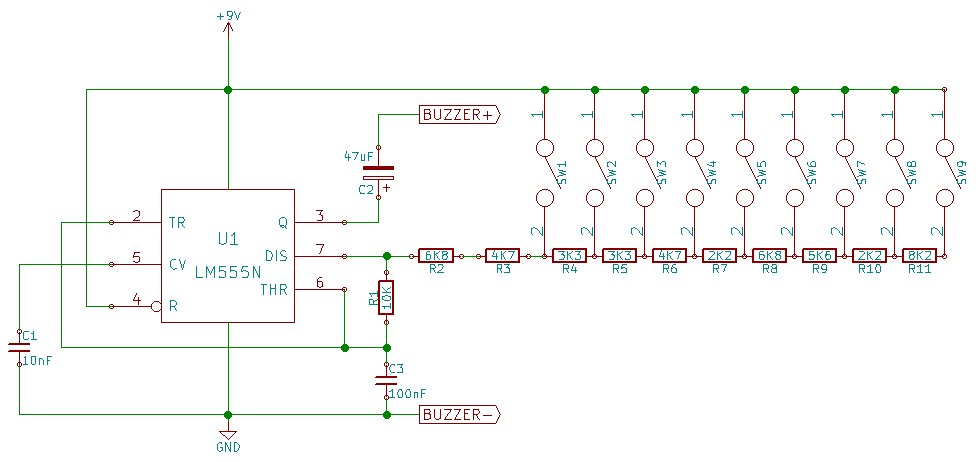
Componentes (BOM):
Circuito:
- 1x IC NE555P (U1)
- 1x Resistência de 10K Ohms (R1)
- 1x Resistência de 6K8 Ohms (R2,R8)
- 1x Resistência de 4K7 Ohms (R3,R6)
- 1x Resistência de 3K3 Ohms (R4,R5)
- 1x Resistência de 2K2 Ohms (R7,R10)
- 1x Resistência de 5K6 Ohms (R9)
- 1x Resistência de 8K2 Ohms (R11)
- 9x Botões de pressão (SW1-9)
- 1x Condensador Cerâmico de 10nF (C1)
- 1x Condensador Electrólitico de 47uF (C2)
- 1x Condensador Cerâmico de 100nF (C3)
- 1x Speaker 8 Ohm de 0.25W a 1W
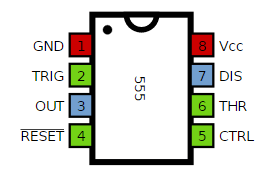
Pin-out dos IC/Componentes
Links úteis:
Artigo do Maker ^
Projeto interessante publicado por um maker.
VertiBOT
O projecto de maker da semana foi feito pelo Miguel Ángel de Frutos e encontra-se publicado no seguinte link.

O VertiBot é um projecto educacional para se entender o funcionamento de sensores combinados com filtros de Kalman e filtros complementares e ajustes de controladores PID.
Breve Introdução
Esta plataforma é um "pêndulo invertido", isto é, um pêndulo cujo centro de massa é acima do seu eixo de rotação ou de articulação. Um sistema deste tipo é inerentemente instável e tem de ser constantemente equilibrado externamente para permanecer numa posição de equilíbrio (instável). Isto é conseguido através da aplicação de um binário no seu eixo de rotação (sistema com um grau de liberdade), como parte de uma retro-alimentação medida pelo sistema. O torque gerado pelo pêndulo equilibra a perturbação inicial.
O pêndulo invertido é um dos problemas clássicos na dinâmica e numerosas referências são feitas a ele nos livros sobre teoria de controle, dando inúmeras estratégias para lidar com isso.

Operação
Os Atuadores do VertiBOT são dois motores DC controlados por um Driver. Estes motores são responsáveis por gerar o torque necessário nas rodas para manter a estrutura no curto deslocamento angular de 0°, sendo este o ponto de ajuste ou de referência (Θ ref = 90).
Se se quiser manter um equilíbrio precário é muito importante saber, com precisão e rapidamente, a inclinação real da estrutura (sinal de feedback). A diferença entre o sinal de referência e o sinal de feedback é o erro: medida necessária para agir em conformidade e para "corrigir" a perturbação.
As alterações das quantidades físicas são medidos pela dupla: giroscópio + acelero-metro. Um giroscópio fornece uma boa medida da velocidade angular pelo tempo Integrado Ö nessa medida, obtemos o valor do ângulo de rotação. No entanto, esta operação irá integrar o ruído do sistema, acumulando em poucas iterações muito desvio. O acelero-metro mede acelerações, tanto estáticas e dinâmicas. A fim de separar os dois componentes que é necessário usar um filtro passa-baixa (este retorna a componente estática: a gravidade) e filtro de alta frequência (aceleração dinâmica). Uma vez separados, uma operação trigonométrica simples calculamos a inclinação. No entanto, a passagem através de um filtro deste tipo (valores médios) introduz-nos um atraso significativo na resposta, fazendo com que o sistema se torne instável. Assim, temos um giroscópio com um desvio crescente ao longo do tempo e um acelero-metro lento e barulhento como entradas para o nosso sistema. A solução é para "fundir" (filtrar) ambas as leituras. Aqui se abre um interessante campo de estudo e experimentação sobre as diferentes estratégias escolhidas para esta finalidade: método único sensor, filtro de Kalman, filtro complementar ...

Depois de saber o sinal de erro, precisamos definir um controlador de atuação sobre os atuadores para que, após algumas iterações consegue minimizar o erro. Uma incursão rápida em teoria de controle ajuda-nos a encontrar uma variedade de controladores sofisticados. Nesta primeira abordagem, escolhemos pra estudar um conhecido controlador PID.
Um controlador PID de base tem uma entrada e uma saída (SISO). A entrada será nosso sinal de erro gerado no parágrafo anterior que a saída vai dizer a rotação a que o motor deve girar para compensar a perturbação. A nova situação é alimentada de volta pelo conjunto de sensores.
A saída do controlador PID é gerada pela soma de três componentes: uma resposta proporcional ao erro, uma acção integrada que tende a cancelar o erro de estado estacionário e uma ação derivada, antecipando a resposta do nosso sistema.
O ajuste ou cálculo de constantes apropriadas Kp, Ki e Kd pode ser realizado por diversas heurísticas, em que uma série de aproximações sucessivas deve tender a uma solução estável para o sistema. Esta tem sido uma tarefa difícil e fastidiosa, e com o qual eu não estou completamente satisfeito. Para facilitar o processo adicionei três potenciómetros, com o qual se variam os valores das constantes na operação em tempo real.

Hardware
O VertiBOT é um printbot, ou seja, sua estrutura foi construída usando uma impressora 3D. Como sempre, você pode encontrar os arquivos das peças em Thingiverse.
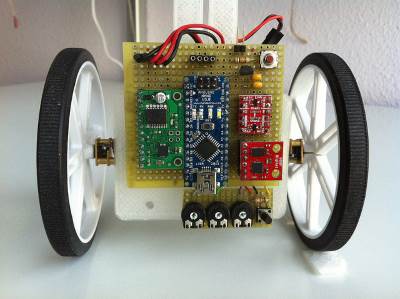
A estrutura é dividida em duas metades que são unidas por meio de parafusos. Este sistema permite a adoção de diferentes alturas e ver como varia a resposta do sistema. A bateria está localizada na parte superior do corpo principal. A parte inferior contém os suportes para os motores (Micrometal Pololu 50:1) e fornece suporte para os principais componentes electrónicos, que devem ser instalados com o mais próximo possível ao sensor do eixo de rotação do pêndulo.
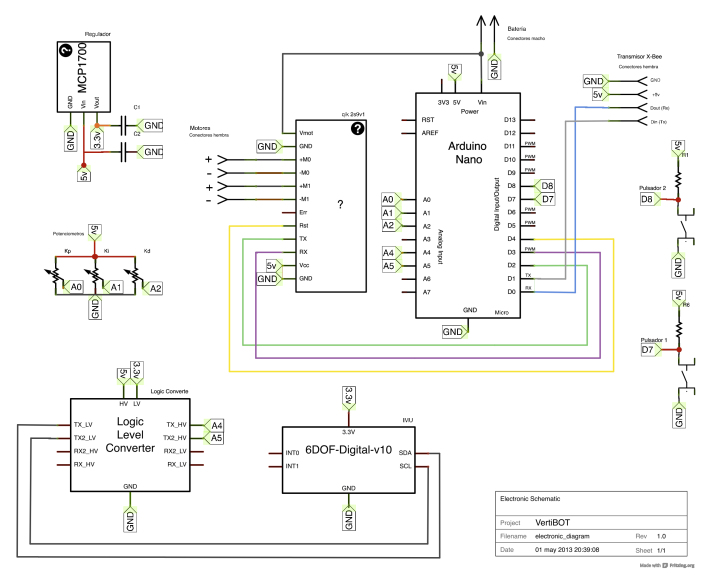
A eletrónica é composta por:
- micro-controlador ATmega 328 16MHz (Arduino Nano).
- IMU 6DOF: acelero-metro e giroscópio. ADXL345 / ITG3200 Comunicação I2C
- Driver para motores da série Pololu Qik2sv1.
- Modem Bluetooth para comunicações sem fio em tempo real.
- Potenciómetros para ajuste PID
- Botões para várias tarefas: mudar algoritmo, deslocamentos de calibração ..
- Regulador de voltagem (MCP1700) e um conversor lógico.
Software
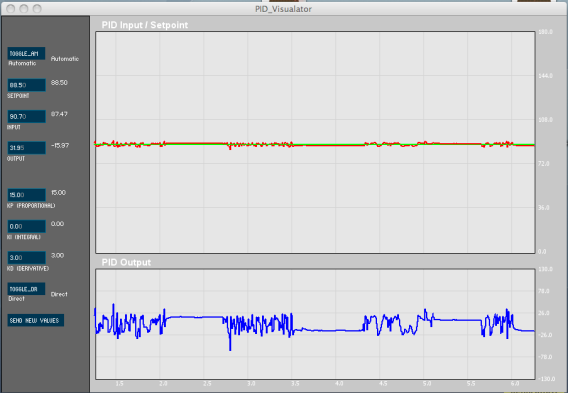
Vídeo. Conclusões finais e perspectivas futuras.
Encontra-se aqui um pequeno vídeo demonstrando a plataforma VertiBOT tentando manter o equilíbrio. Os motores atuais não são rápidos o suficiente para manter a estrutura estável após uma perturbação muito grande, sem embraiagem, se ele parece ser capaz de ficar perto de quebrar mesmo em pequenas oscilações. Foram usados 2 conjuntos diferentes de PID dos três valores: um conservador, quando estamos perto do ponto de referência e um muito agressivo quando estamos longe do ponto de equilíbrio.
Neste momento estamos trabalhando numa versão 2.0 além de incorporar um movimento mais rápido tem encoders nos motores das rodas. Desta forma, pode complementar o sinal de feedback fornecido pelo sensor de uma forma muito mais precisa.

O código fonte encontra-se no Git.
Outros artigos/projetos interessantes de ler:
- Arduino Oscilloscope
- MESA-VIDEO : 800×600 DIGITAL VIDEO FOR ARDUINOS OVER 2-WIRE SERIAL MESA-BUS
- The Hexachord, an Arduino-Controlled Musical Instrument
- Travel-PIC
Compras ^
Artigos do ebay ou de outras lojas online que poderão ser úteis em projetos. A informação aqui presente apenas serve para ajudar na aquisição dos componentes. O altLab não tem qualquer intervenção em qualquer negócio aqui listado.
600pcs 30 kinds Each 20 1/4w Resistance 1% Metal Film Resistor Bag New
(http://www.ebay.co.uk/itm/281423441132) - US $2.83
Description:
- Experimental resistance package.
- 1/4W metal film resistor package.
- 1% precision.
- 1% error.
- 30 kinds of resistance.
- Each of 20Pcs.
- Colored ring.
- Accuracy of 1%.
- A row: 20Pcs.
- Each row are written in resistance value, can be better for identify and select.
The specifications are as follows:
- 10Ω, 22Ω, 47Ω, 100Ω, 150Ω, 200Ω, 220Ω, 270Ω, 330Ω, 470Ω, 510Ω, 680Ω, 1KΩ, 2KΩ, 2.2KΩ, 3.3KΩ, 4.7KΩ, 5.1KΩ, 6.8KΩ, 10KΩ, 20KΩ, 47KΩ, 51KΩ, 68KΩ, 100KΩ, 220KΩ, 300KΩ, 470KΩ, 680KΩ, 1M.
Packing List:
- 600pcs 30 kinds Each 20 1/4w Resistance 1% Metal Film Resistor Bag New
Kit 10value 200pcs 4X7mm 0.1uF-100UF Electrolytic Capacitor Assortment new
(http://www.ebay.co.uk/itm/261996961412) - US $5.32

Specifications:
- Product Name: Aluminum Electrolytic Capacitor
- Type: Radial Lead
- Maximum Temperatureimension: 105°C
- Capacitance Tolerance: ±20%
- Body Size: 4 x 7mm
30 Values 300pcs Ceramic Capacitor 2pf-0.1UF Assortment Kit Q
(http://www.ebay.co.uk/itm/251517348320) - £1.19

Features:
Kit Contents
- 2P 3P 5P 10P 15P 22P 30P 33P 47P 68P 75P 82P 101(100P) 151 221 331 471(470pf) 102(1nf) 152 222 332 472 681 682 103(10nf) 153 223 473 683 104(100nf)
- 10 PCS per each , Total 300 PCS
That's all Folks!